開催日
2025年10月12日(日)、13日(月・祝日)
会場
近畿大学附属広島中学校東広島校(東広島市高屋うめの辺2番)
参加について
瀬戸内海周辺で活動するロボカッパーの交流や親睦を目的としています。 年末から年明けにかけてノード大会、ブロック大会が開催されるので、事前にルールの確認やロボットの確認として参加してください。 もちろん交流が目的でもOKです!

自立型ロボットを自分で組み立て、プログラミングしよう!

2025年10月12日(日)、13日(月・祝日)
近畿大学附属広島中学校東広島校(東広島市高屋うめの辺2番)
瀬戸内海周辺で活動するロボカッパーの交流や親睦を目的としています。 年末から年明けにかけてノード大会、ブロック大会が開催されるので、事前にルールの確認やロボットの確認として参加してください。 もちろん交流が目的でもOKです!
倉敷会場と岡山会場の2会場で開催します。 ご都合の良い会場でお申し込み下さい。 作成したロボットはご自分のものになります。 大会へ参加するときまで、ルールの範囲内で改良することができます。
18,000円
3回の講習会参加費、ロボット部品代、ロボカップジュニア・ノード大会参加費を含みます。 第1回開始前に中止となった場合、参加費は返却いたします。
第1回 2025年6月22日(日)
第2回 2025年6月29日(日)
第3回 2025年7月 6日(日)
サポート講習会1 2025年9月28日(日)
サポート講習会2 2025年10月5日(日)
第1回 2025年8月 3日(日)
第2回 2025年8月24日(日)
第3回 2025年8月31日(日)
サポート講習会 2025年9月14日(日)
都合の良い会場にご参加下さい。
2025年11月16日 倉敷ノード大会(ライフパーク倉敷)
2025年11月23日 岡山ノード大会(サイピア)
参加は自由で費用は不要です。 内容は未定ですが、講習会中で追加の説明が必要と判断した部分や、質問に答える予定です。 詳しい内容は講習会の中で説明します。
岡山会場のサポート講習会は1回のみ開催です。 どちらの会場に参加しても大丈夫です。
10:00~15:30(昼食休憩含む)
※昼食はご用意ください。
第1回 ロボット作成(電子部品の半田付け、ネジ締めにより組み立てなど)
第2回 ロボット制御プログラム(プログラム作成の基本)
第3回 ロボット制御プログラム(プログラムの作り方に慣れてもらう)
※プログラムはノーコード(ブロック形式)で作ります。 Scratchに似たプログラムになります。
※会場内ではお弁当を食べることができません。
OS: Windows11 、Windows10
メモリ:8GB以上
HDD/SSD: 2GB以上の空きがあること
USB: ロボットとの接続で1つ利用(USB Type-A)
各会場 先着8名
下記URL(GoogleForms)よりお申し込み下さい。
定員になり次第、締め切らせていただきます。
お申し込み後、参加費のお支払いなどの案内を、メールにてお送りします。 3日経過しても、案内のメールが届かない場合は、再度、お申し込み下さい。 まれに迷惑メールに仕分けされていることがありますので、そちらもご確認下さい。 メールはGmailよりお送りします。
案内メール受信後1週間以内に参加費を振り込みしてください。 1週間以内に振り込みが無い場合はキャンセルとさせて頂きます(できれば、キャンセルするときはご連絡ください)
主催 NPO法人岡山ロボット技術子供育成協会
共催 ロボカップジュニア岡山ブロック
後援
回答1 キーボードは数字キーのみ使います。 これまでの経験で、子どもたちがすぐに操作を覚えてしまうので、少し使ったことがあるくらいで大丈夫です。
回答2 お休みいただいてかまいません。 ただ、別の日に補習などはできませんが、別の会場に参加いただけます(会場の準備があるため、事前にご連絡ください)
回答3 ガチに見えるチームはいますが、それほどではないと思います。
大会はクラス分けがあります。
・日本リーグ エントリー: 初心者向け。このクラスに参加していただきます)
・日本リーグ ライトウェイト: 中級者向け。日本一を目指します)
・ワールドリーグ ライトウェイト: 上級者向け。世界一を目指します)
・ワールドリーグ オープン: 上級者向け。ガチ勢の集まりです。世界一と新技術に挑戦します)
順に難易度が上がるルールです。
回答4 講習会だけであれば問題ないのですが、ロボカップジュニア大会は順位を競う競技になります。 私たちは低学年の子どもたちに、競うことを強いるのを避けたいと考えています。 小学4年生が大丈夫と言うわけではありませんが、ロボット等の仕組みに興味を持ち、自分で改造できるのは小学4年生くらいからと判断して、年齢制限を入れております。
倉敷会場と岡山会場の2会場で開催します。 ご都合の良い会場でお申し込み下さい。 作成したロボットはご自分のものになります。 大会へ参加するときまで、ルールの範囲内で改良することができます。
第1回 2024年6月16日(日)
第2回 2024年7月 7日(日)
第3回 2024年8月 4日(日)
サポート講習会 2024年9月22日(日)
第1回 2024年7月21日(日)
第2回 2024年7月28日(日)
第3回 2024年8月25日(日)
サポート講習会 2024年9月1日(日)
内容は未定ですが、気になる部分の質問に答えたり、要望されたプログラムの説明を行いたいと思います。 詳しい内容は講習会の中で説明します。
10:00~15:30(昼食休憩含む)
※昼食はご用意ください。
第1回 ロボット作成(電子部品の半田付け、ネジ締めにより組み立てなど)
第2回 ロボット制御プログラム(プログラム作成の基本)
第3回 ロボット制御プログラム(プログラムの作り方に慣れてもらう)
※プログラムはノーコード(ブロック形式)で作ります。 英数字をキーボードから入力する方法ではありません(文字キー/数字キーは使います)
※会場内ではお弁当を食べることができません。
OS: Windows11 、Windows10
メモリ:8GB以上
HDD/SSD:2GB以上の空きがあること
USB: ロボットとの接続で1つ利用(USB Type-A)
各会場 先着8名
18,000円
3回の講習会参加費、ロボット部品代、ロボカップジュニア・ノード大会参加費を含みます。 第1回開始前に中止となった場合、参加費は返却いたします。
下記URL(GoogleForms)よりお申し込み下さい。
岡山会場へのお申し込みはこちらをクリックして下さい(キャンセル待ち)
※岡山会場は定員に達しており、キャンセル待ちとなります。 倉敷会場を検討いただくか、お申し込み後キャンセルがあるまでお待ちください。
2024年5月20日(月)まで。
お申し込み後、参加費のお支払いなどの案内を、メールにてお送りします。 3日経過しても、案内のメールが届かない場合は、再度、お申し込み下さい。 まれに迷惑メールに仕分けされていることがありますので、そちらもご確認下さい。 メールはGmailよりお送りします。
案内メール受信後1週間以内に参加費を振り込みしてください。 1週間以内に振り込みが無い場合はキャンセルとさせて頂きます(できれば、キャンセルするときはご連絡ください)
主催 NPO法人岡山ロボット技術子供育成協会
共催 ロボカップジュニア岡山ブロック
後援 岡山市教育委員会(岡地子第1175-1号)、倉敷市教育委員会
回答1 キーボードは数字キーのみ使います。 これまでの経験で、子どもたちがすぐに操作を覚えてしまうので、少し使ったことがあるくらいで大丈夫です。
回答2 お休みいただいてかまいません。 ただ、別の日に補習などはできませんが、別の会場に参加いただけます(会場の準備があるため、事前にご連絡ください)
回答3 ガチに見えるチームはいますが、それほどではないと思います。
大会はクラス分けがあります。
・日本リーグ エントリー: 初心者向け。このクラスに参加していただきます)
・日本リーグ ライトウェイト: 中級者向け。日本一を目指します)
・ワールドリーグ ライトウェイト: 上級者向け。世界一を目指します)
・ワールドリーグ オープン: 上級者向け。ガチ勢の集まりです。世界一と新技術に挑戦します)
順に難易度が上がるルールです。
回答4 講習会だけであれば問題ないのですが、ロボカップジュニア大会は順位を競う競技になります。 私たちは低学年の子どもたちに、競うことを強いるのを避けたいと考えています。 小学4年生が大丈夫と言うわけではありませんが、ロボット等の仕組みに興味を持ち、自分で改造できるのは小学4年生くらいからと判断して、年齢制限を入れております。
2024年2月18日(日)に開催されるキッズフェスに参加します。 サッカーロボットのプログラム体験会を開催します。 マウスと数字キーが操作できれば大丈夫です。
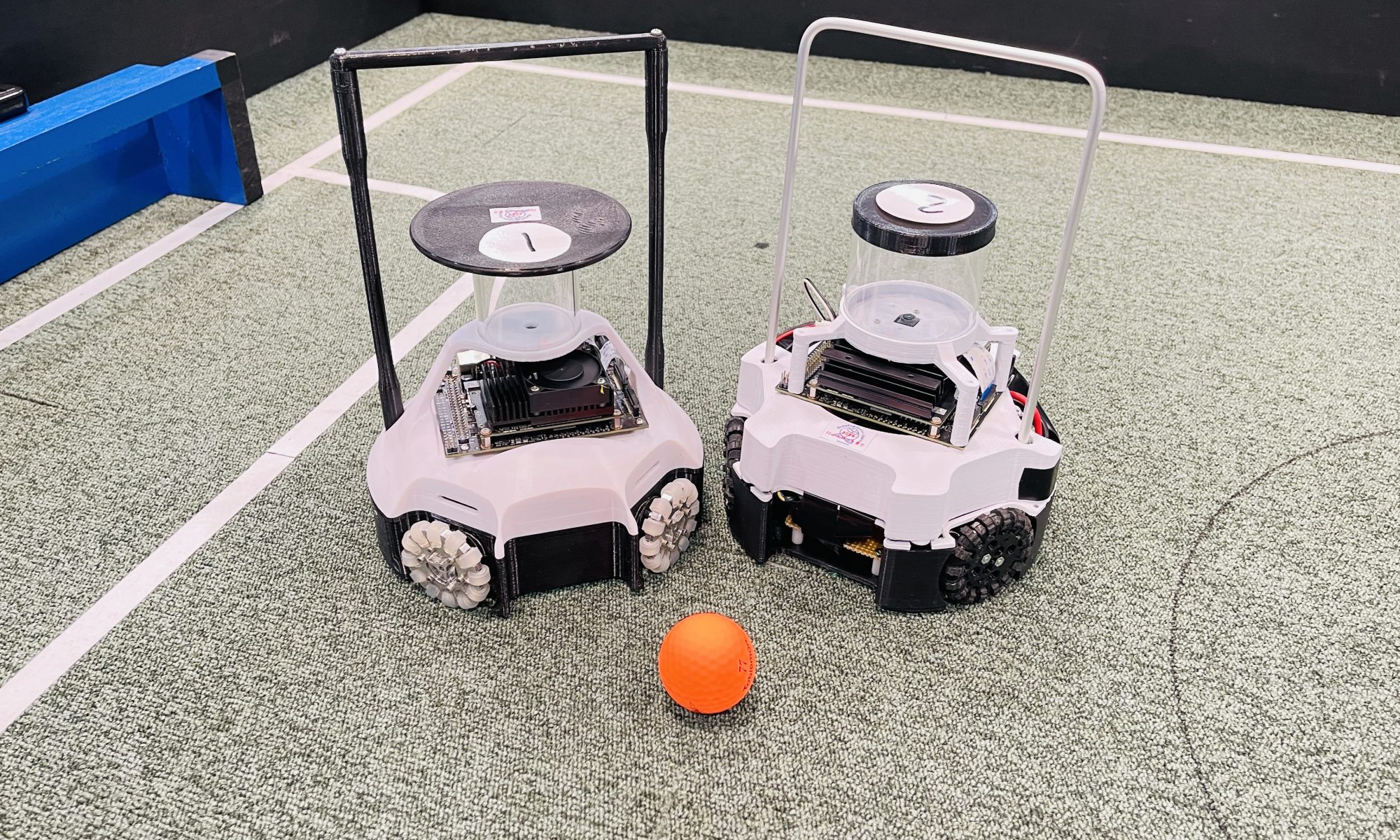
講習会で作るロボットと同等のロボットを使うので、講習会で作るロボットが気になる方はご参加ください。 見学だけでもOKです。
2023年11月19日(日)に倉敷ノード大会、11月26日(日)に岡山ノード大会が開催されました。 講習会に参加いただいた子供たちも、大会に出場しています。
成績が上位のチームは12月17日(日)に開催される岡山ブロック大会に出場しました。 それぞれがどのような結果となり、どういった思いを持ったのか分かりませんが、きっと良い経験になったと思っています。
講習会は来年も開催予定です。 チラシや案内には新規募集の事だけを記載していますが、講習会の日程で、相談会も開催します。 昨年や今年参加したけど、相談したいことがある子供たちがいれば、連絡して参加下さい。
来年の大会も盛況であることを願っております。
2023年10月8日(日)広島県三原市の三原リージョンプラザにて、ロボカップジュニアの練習会が開催されます。 ORJAも共催していますので、お手伝いいたします。
詳しくは、ロボカップジュニア・広島ブロックのホームページをご覧下さい。
2023年8月27日(日)に人と科学の未来館サイピアで、4日コースの4日目(最終日)を行いました。 この日の予定は以下の通りです。
ボールが左にあるとき、中央にあるとき、右にあるときの数値を調べます。 またロボットのセンサーは方向を変更できるので、できるだけ左右差があるように調整します。 この左右差を使って、ボールを追いかけるプログラムを考えます。
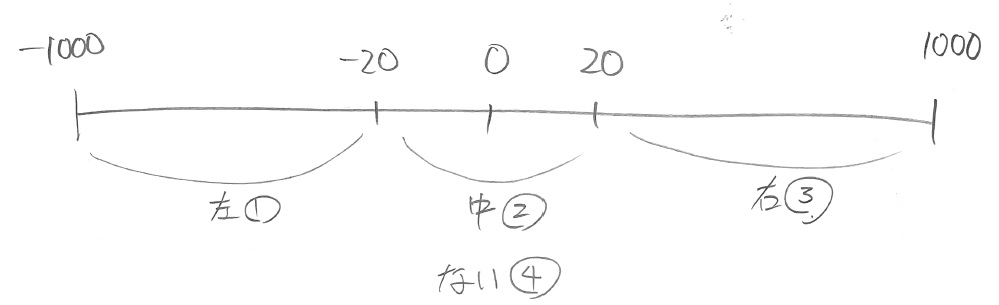
例です。 左右差を使い、値の範囲を決めます。
これをプログラムのdirの数値として正しくなるか調べます。
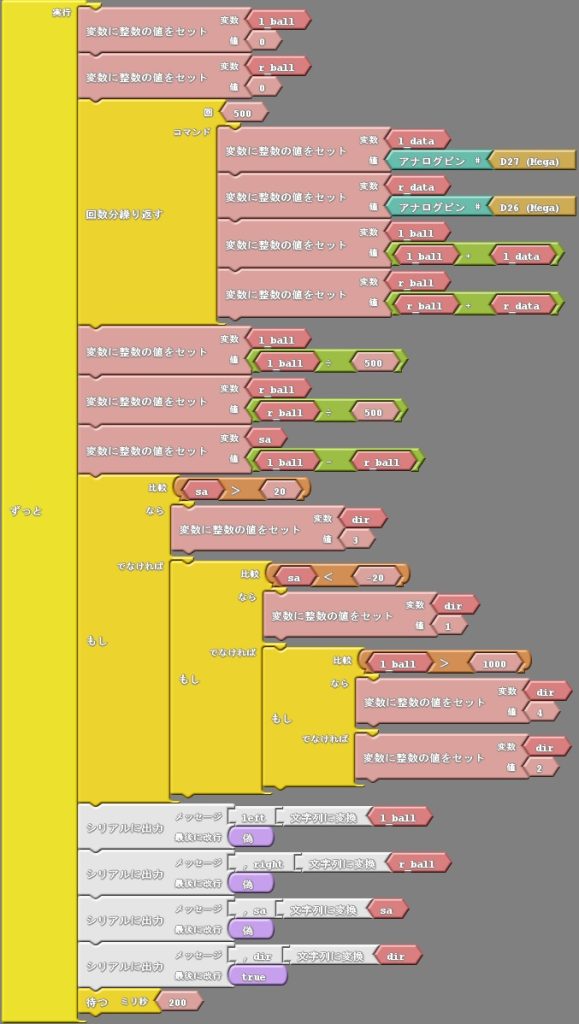
シリアルモニタで、ボールが左にあるとき1、中央にあるとき2、右にあるとき3、ボールが無いとき4と表示されるか確認します。
モーターを動かすときは、スイッチを押すまで動かないよう、おまじないを追加します。 モーター値は全て100ですが、自分でどう動かすか考えます。
このプログラムが期待したとおりに動けば、ボールを追いかけるロボットができあがります。 なかなか調整が難しいと思います。 やはりセンサーが2つになると、プログラムが複雑になってきます。
今回は私が考えた仕組みなので、すぐに理解はできないかもしれないです。 自分なりに考えて作っても良いです。 考えながら作って下さい!
次回は三原市の大会か、練習会でお会いしましょう!
どう言うタイミングで発生するのか分かりませんが、たまに書き込みできなくなります。 原因は、USBケーブルが外れていることが多いのですが、シリアルポートが無効に(白く)なっているときもあります。
このときの対処方法は2つです。
2023年8月13日(日)に人と科学の未来館サイピアで、4回コースの3日目を行いました。 この日の予定は以下の通りです。
前回(7月30日)のプログラムを改修します。 このプログラムはボールに近づくと(ボールが見つかったら)停止するものです。
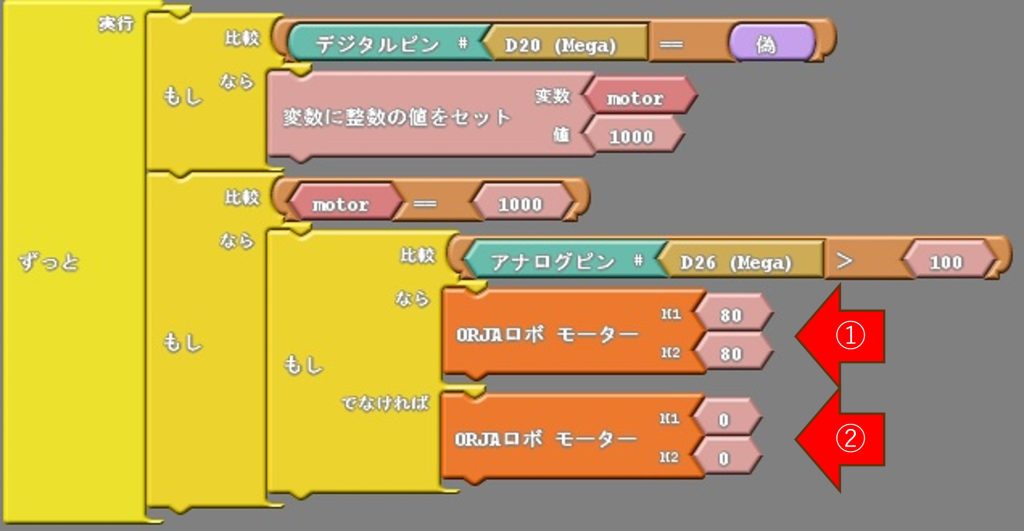
このプログラムの意味は、①=ボールがないとき、②=ボールが見つかったときとなります。 これを元に、①=ボールがないので右回りに探す、②=ボールが見つかったので押す、と考えます。 この考えでプログラムを作ると、下記のようになります。
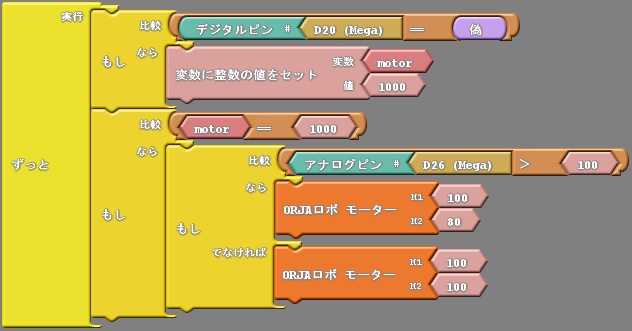
①=右に回る、と言うのは、右に行くプログラムで、②=押す、と言うのはまっすぐ進む(前にボールはあるはず)プログラムになります。 まずは、これで試合を行ってみます。 試合はルールを覚えるのに良い機会になります。 午前中は試合を行って終了です。
午後は、ボールセンサーの値を再確認します。 ロボットはボールの有無を、センサーからの数値でしか判断できません。 調べてみると、こんな感じです。
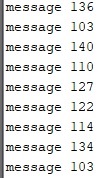
ボールもロボットも動かしていないのに、ばらつきがあります。 これはボールの仕組みでこうなりますが、このままでは使いにくいので、ボール値の平均を計算してみます。
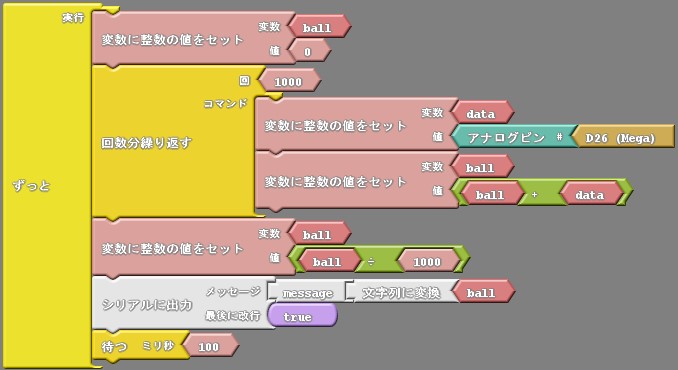
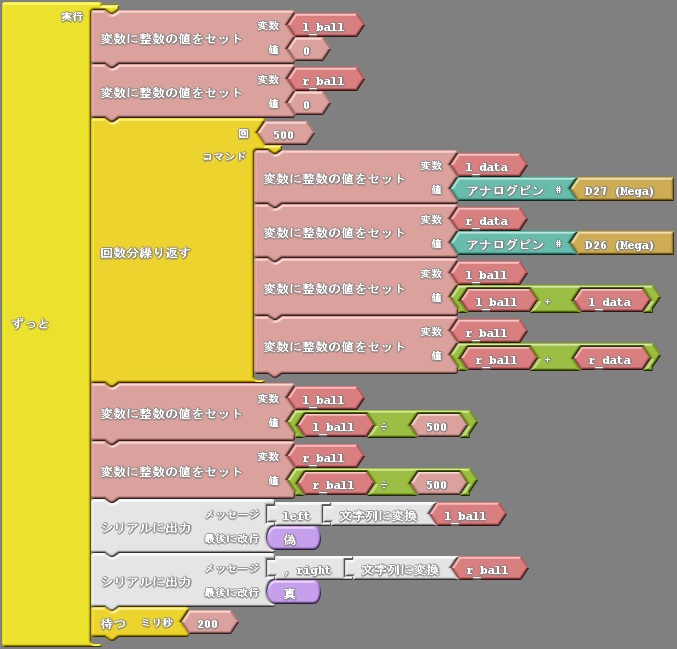
1,000回読み出して、その平均を計算します。 変数にballとdataを使うのは、プログラムが正しく動かないとき、調べやすくするためです。 だいたい以下のように数値が同じになってきます。

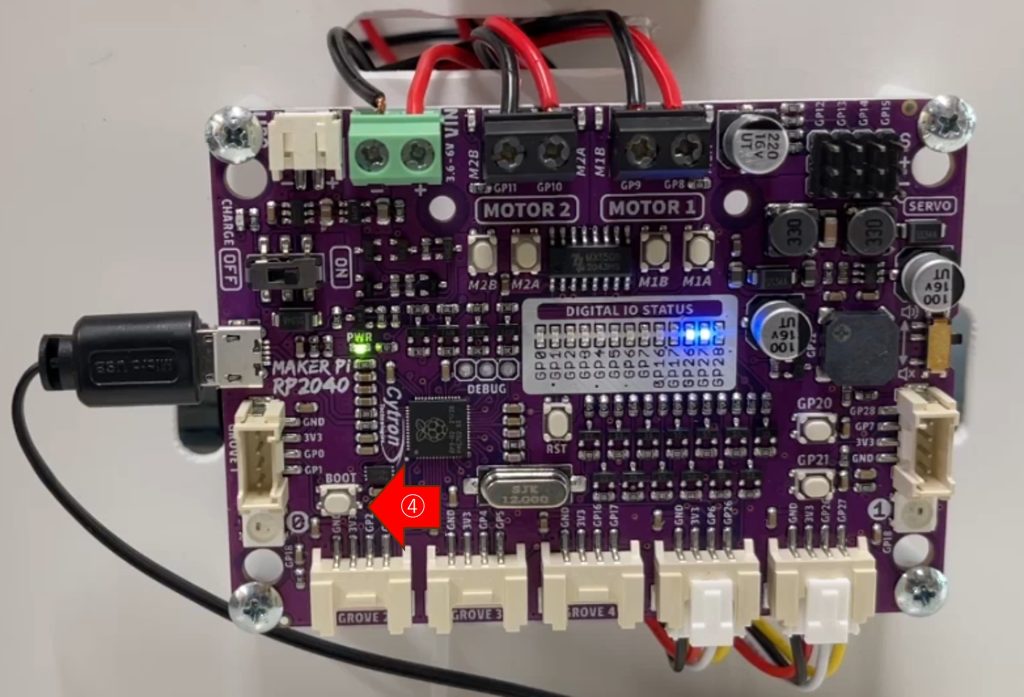
ボールセンサーには、値の調整を行うネジがあります。 ③の部分です。
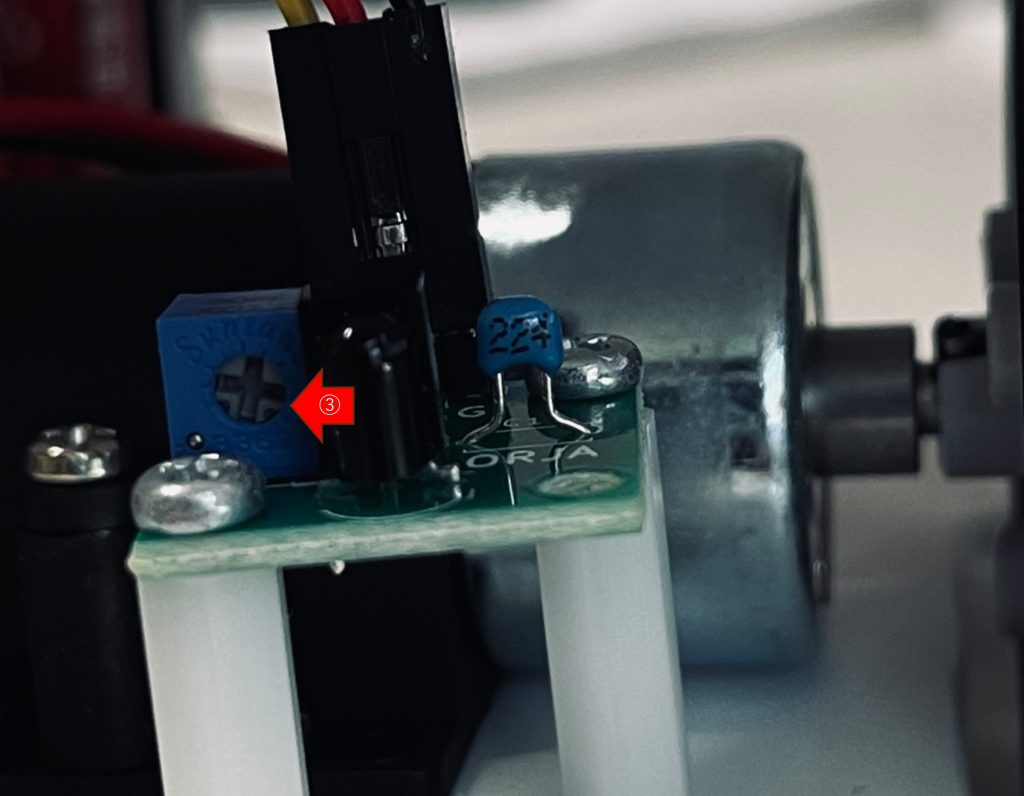
2つのボールセンサーの値を表示させながら、このネジを回します。 2つのボールセンサーの値が同じになるように調整します。
ここまでで3日目の講習会は終わりです。