
講習会資料(2023年度)
講習会2023・2日目・岡山会場
2023年7月30日(日)に人と科学の未来館サイピアで、4回コースの2日目を行いました。
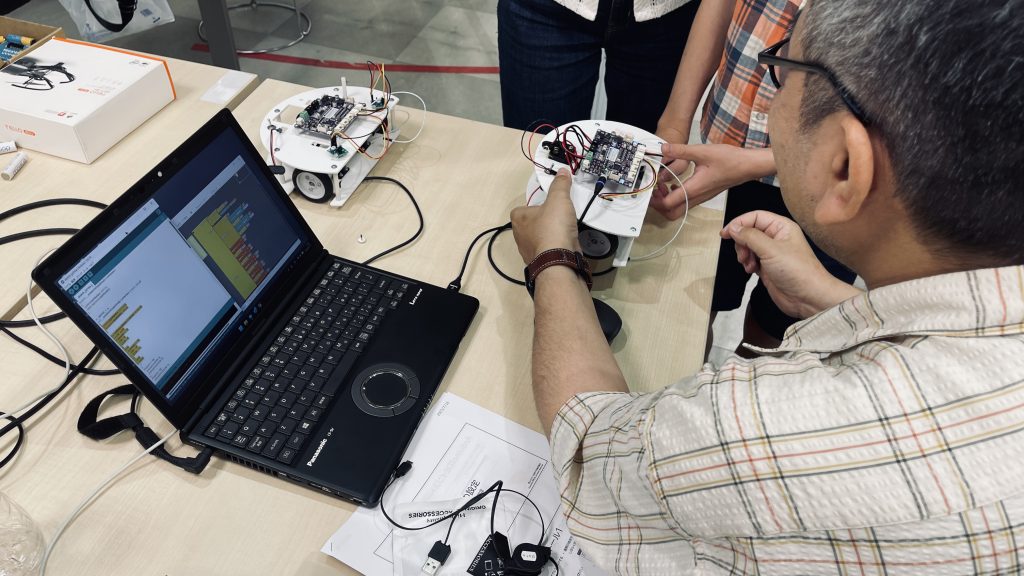
午前中にPCで作ったプログラムを、ロボットに伝えるところまで終わらせる予定でしたが、ロボットプログラムの開発環境(Arduino)の設定で終わってしまいました。
午後からはPCでプログラムを作り、それをロボットで実行してみます。
1.最初は1個のLEDを表示するところから始めます。
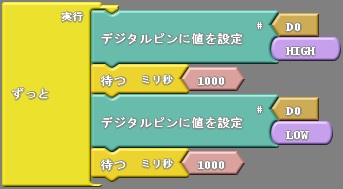
これでマイコン上にあるLED(GP0)が点滅します。
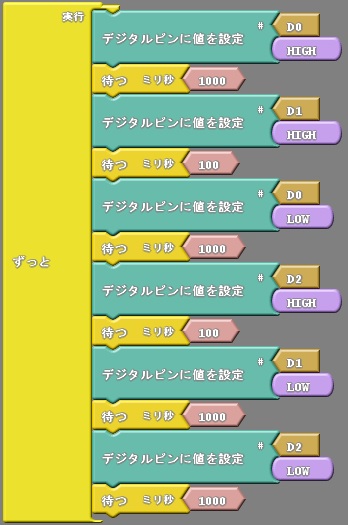
2.せっかくなのでLEDを流れるように表示します。
3.スイッチを押すとモーターが回るようにします。
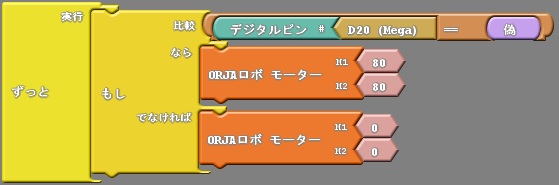
スイッチはGP20を使います。 プログラムからはデジタルのD20で読み取りできます。 スイッチを押すと偽(0)、離すと真(1)になります。
※マイコンの機種によりスイッチを押したときの真偽(0か1)は変わります。
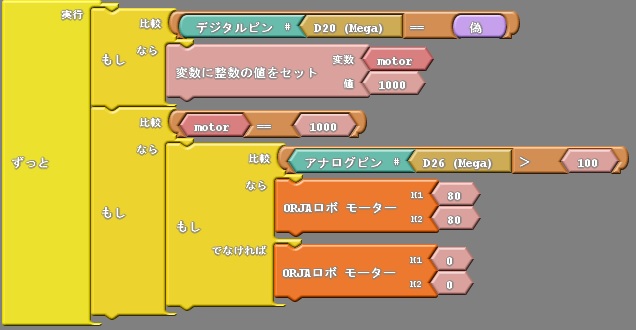
4.スイッチを押すとロボットが動くようにします。

上記3では、スイッチを押しているときしかロボットは動きません。 それではロボットは動かせないので、1度スイッチを押したら動くようにします。
※マイコン(RP2040)はPCにUSBで接続するとモーターが動きます。 PCのUSBに負担が掛かると思われるため、スイッチを押してから動作するようにしています。
5.ボールを見つけるセンサ-(赤外線センサー)の値を調べる

このプログラムを実行すると、PCのシリアルモニタでセンサーの値を表示できます。 ロボットがボールを見つけるとは、数値が変わること、と言うのを知ってもらいます。
6.ボールに近づいたら止まる
なんとなくでも良いので、ロボットをセンサーの値で制御する感じを体験してもらいたいので、できるだけボールの近くまで進んで止まるようなプログラムを作ります。
ここまでで2日目の講習会は終わりです。
岡山市・西ふれあいセンターで体験会
2023年7月29日(土曜)は、岡山市の西ふれあいセンターで、サッカーロボットのプログラミング体験会を行いました。
1回が1時間の体験会で、サッカーを行うロボットのプログラムを、自分で変更してもらいました。 小学校1年生から6年生までが参加しましたが、みんな楽しそうに自分で変更したロボットの動きを観察していました。



講習会2023・1日目・岡山会場
2023年7月16日(日)に人と科学の未来館サイピアで、4回コースの初日が始まりました。
※倉敷会場も同様の内容です。
大まかな作業と時間は次のようになります。
- 10:00~12:00 部品のハンダ付け
- 12:00~13:00 お昼休憩(サイピアは建物内で飲食できません)
- 13:00~15:00 部品を組み立てロボットの形を作る
- 15:00~15:30 ロボットの動作確認
ハンダ付け
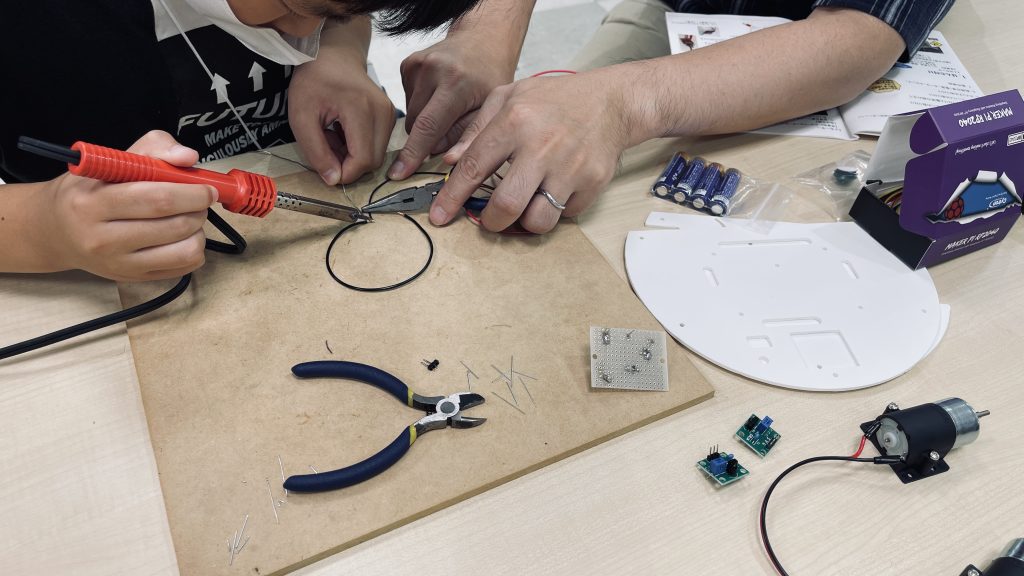
保護者にもお手伝いいただきながらハンダ付けします。 みんなハンダ付けは初めてなので、練習用の部品も用意しています。 練習用で慣れてから、本当の部品のハンダ付けをします。
- センサー基板
- モーターの配線
- 電池スイッチの配線
ハンダ付けは上記3つですが、みんな慎重に行うので午前中の2時間は掛かってしまいます。 ハンダ付けしたら、電子部品の足で不要な部分をニッパで切ります。
注意点は不要な足の先端を持って切ることです!
ニッパで切ったとき持っていないと、足が飛んで行きます。 目に入ると大変なので、これだけは何度も注意するよう伝えます。
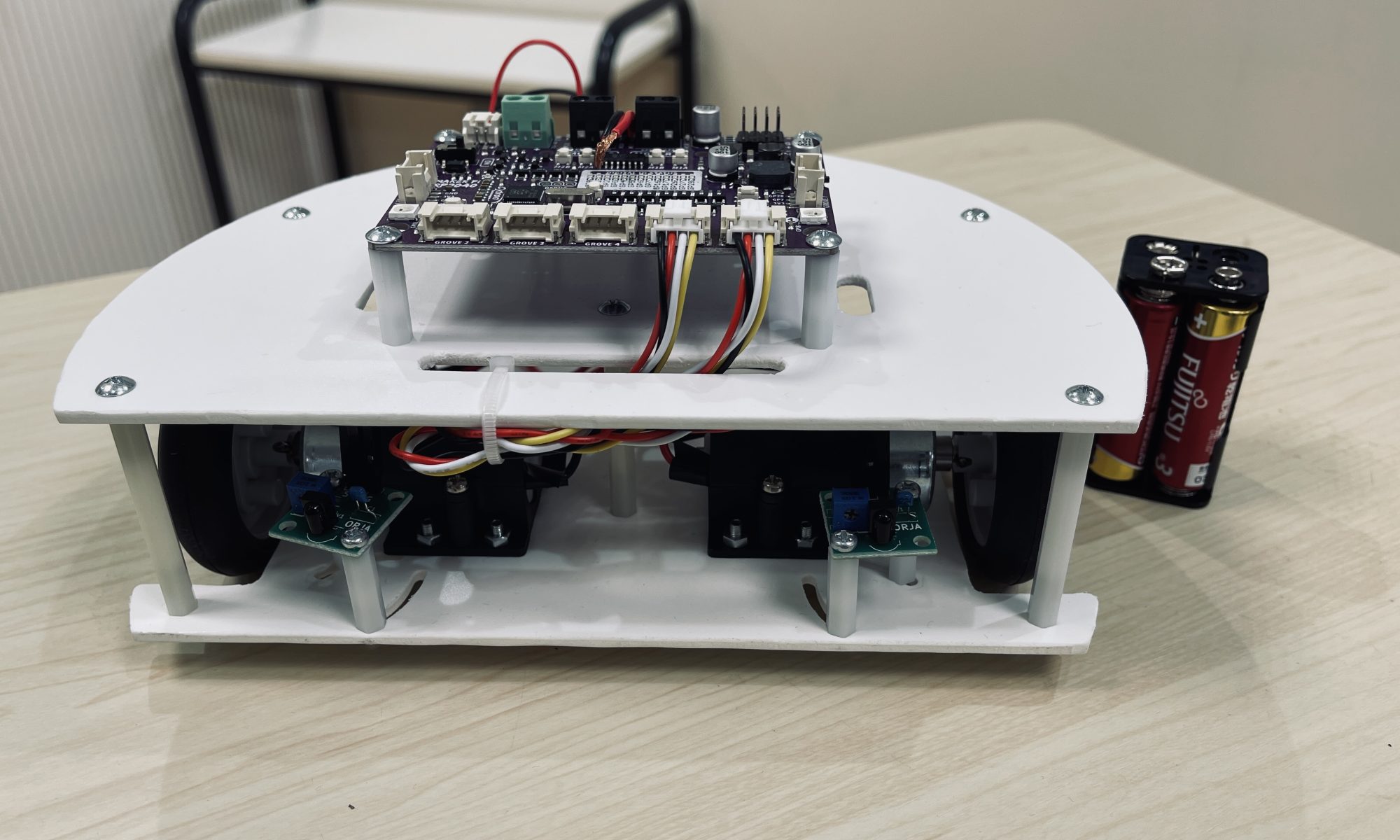
組み立て

モーターやセンサー基板、電源スイッチの配線を取り付けていきます。
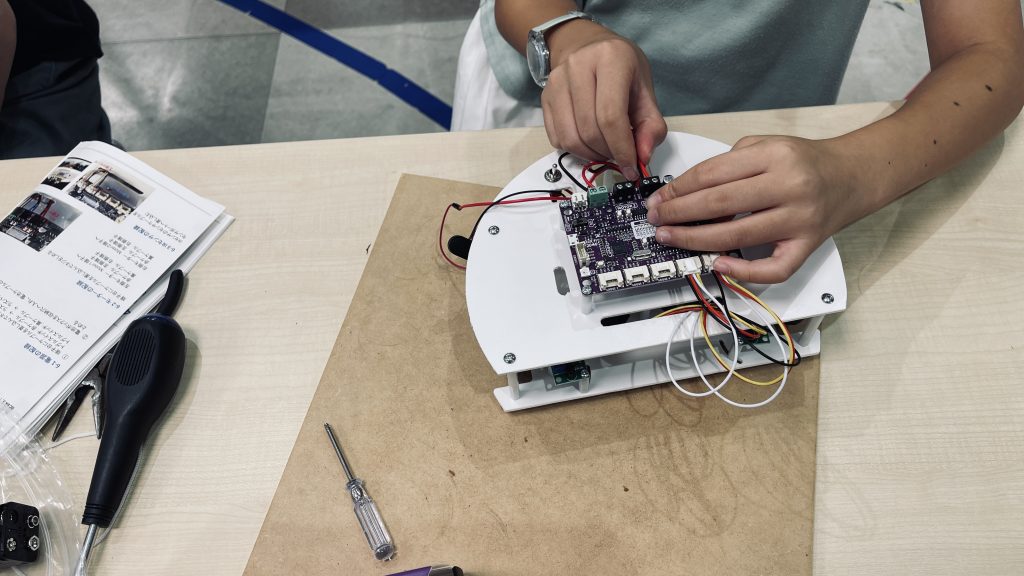
電源スイッチやモーターの配線、センサー基板の配線をマイコンに接続すると完成です。 ネジ締めと配線をつなぐだけですが、これも慎重に行うためか時間がかかります。
動作確認
センサーが正しく動作しているか、モーターは回るか、の2点を、実際にプログラムを書き込み確認します。 どちらも問題なければ、これで自分のプログラムで動くロボットの完成です。
この日は少し時間が余ったので、こちらで用意したサッカープログラムで、サッカーの模擬試合を楽しみました。 次回からは自分でプログラムを作るための講習になります。
ロボカップジュニア・北九州オープン開催のお知らせ
開会期日 2023年8月5日(土)・6日(日)
開催会場 北九州市科学館 スペースLABO ANNEX
競技種目 ロボカップジュニア サッカー
(ビギナーズ・ライトウェイト・オープン)
申込期間 2023年6月18日(日)~7月16日(日)17:00
申込・問い合わせ先 スペースLABO ANNEX TEL 093-663-0550
主催 北九州市科学館 スペースLABO
共催 北九州市ロボカップ会
申し込みはこちらのURLから
https://www.city.kitakyushu.lg.jp/ko-katei/11800360.html

せとうちオープン2023
ロボカップジュニアジャパン・広島ブロック運営委員会と共催で、せとうちオープン2023を開催します。
日時 2023年6月17日(土)から18日(日)
場所 三原リージョンプラザ(広島県三原市円一町2丁目1−1)
詳しくは、広島ブロックのホームページをご覧下さい。
ロボットサッカー作成講習会2023
倉敷会場と岡山会場の2会場で開催します。 ご都合の良い会場でお申し込み下さい。 作成したロボットはご自分のものになります。 大会へ参加するときまで、ルールの範囲内で改良することができます。
開催日
倉敷会場(ライフパーク倉敷)
第1回 2023年6月25日(日)
第2回 2023年7月 9日(日)
第3回 2023年8月 6日(日)
第4回 2023年8月20日(日)
岡山会場(人と科学の未来館サイピア)
第1回 2023年7月16日(日)
第2回 2023年7月30日(日)
第3回 2023年8月13日(日)
第4回 2023年8月27日(日)
時間
10:00~15:30(昼食休憩含む)
※昼食はご用意ください。
内容
第1回 ロボット作成
第2回 ロボット制御プログラム(入門編)
第3回 ロボット制御プログラム(基礎編)
第4回 ロボット制御プログラム(応用編)
定員
各会場 8名(先着順です)
参加費
18,000円
4回の講習会参加費、ロボット部品代、ロボカップジュニア・ノード大会参加費を含みます。 第1回開始前に中止となった場合、参加費は返却いたします。
参加条件
- 岡山県在住、または、岡山県の学校に通う小学4年生~中学3年生であること
- ロボカップジュニア・ノード大会に参加の意思があること
- パソコンを持参できること
- 基本的なパソコン操作(キーボード、マウスの取り扱い)ができること
- 講習会に児童と共に保護者が参加できること
申し込み方法
下記URL(GoogleForms)よりお申し込み下さい。
応募期間
2023年5月21日(日)まで。
お申し込み後、参加費のお支払いなどの案内を、メールにてお送りします。 3日経過しても、案内のメールが届かない場合は、再度、お申し込み下さい。 まれに迷惑メールに仕分けされていることがありますので、そちらもご確認下さい。 メールはGmailよりお送りします。
案内メール受信後1週間以内に参加費を振り込みしてください。 1週間以内に振り込みが無い場合はキャンセルとさせて頂きます。
主催
主催 NPO法人岡山ロボット技術子供育成協会
共催 ロボカップジュニア岡山ブロック
後援 岡山市教育委員会(岡地子第1293-1号)、倉敷市教育委員会
Q&A
質問1 マウスやキーボードを使ったことがありません。 参加できますか?
回答1 キーボードは数字キーのみ使います。 これまでの経験で、子どもたちがすぐに操作を覚えてしまうので、少し使ったことがあるくらいで大丈夫です。
質問2 4日間全ての日に参加しなければいけませんか?
回答2 お休みいただいてかまいません。 ただ、別の日に補習などはできませんが、別の会場に参加いただけます(会場の準備があるため、事前にご連絡ください)
質問3 ロボカップジュニア大会はガチの大会なのでしょうか?
回答3 ガチに見えるチームはいますが、それほどではないと思います。
大会はクラス分けがあります。
・日本リーグ (初心者向け。 このクラスに参加していただきます)
・ワールドリーグ (世界大会を目指します)
・オープンリーグ (ガチ勢の集まりです)
順に難易度が上がるルールです。
質問4 小学3年生でパソコンは操作できます。 参加できないでしょうか?
回答4 講習会だけであれば問題ないのですが、ロボカップジュニア大会は順位を競う競技になります。 私たちは低学年の子どもたちに、競うことを強いるのを避けたいと考えています。 小学4年生が大丈夫と言うわけではありませんが、ロボット等の仕組みに興味を持ち、自分で改造できるのは小学4年生くらいからと判断して、年齢制限を入れております。
ロボット作成講習会2022
4日間の予定で、ORJAが開催するロボット作成講習会を行います。
【講習会の日程】
第1回:2022年7月10日(日)10:00~15:30 ロボット製作
第2回:2022年7月31日(日)10:00~15:30 プログラミング入門編
第3回:2022年8月14日(日)10:00~15:30 プログラミング基礎編
第4回:2022年8月28日(日)10:00~15:30 プログラミング応用編
※昼食休憩を含みます。 昼食は各自でご用意ください。
【定員】
8名(先着順)
【参加費】
18,000円(ロボットの費用を含みます)
【参加資格】
・岡山県在住または岡山県の学校に通う小学生4年生から中学3年生
・2022年秋開催のロボカップジュニア岡山ノード大会、又は倉敷ノード大会への参加意思があること
・ノートパソコンを持参できること。
OSはメーカー保証のあるバージョンのWindows/MacOSであること。
USBのコネクタ、または、USB機器が接続できる変換ケーブルがあること。
・基本的なパソコン操作(キーボード・マウスの取り扱い)ができること。
・講習会に児童と共に保護者が参加出来ること。
【チラシ】
【申し込み方法】
下記URL(GoogleFormsになります)よりお申し込み下さい。
募集期間は5月24日(火)から6月24日(金)までとなっています。
お申し込み後、参加費のお支払いなどの案内を、メールにてお送りします。 3日経過しても、案内のメールが届かない場合は、再度、お申し込み下さい。 まれに迷惑メールに仕分けされていることがありますので、そちらもご確認下さい。 メールはGmailよりお送りします。
※メールは、パソコンでも受信できるアドレス(Gmailなど)をご用意下さい。
【Q&A】
質問1 マウスやキーボードを使ったことがありません。 参加できますか?
回答1 キーボードは数字キーのみ使います。 これまでの経験で、子どもたちがすぐに操作を覚えてしまうので、少し使ったことがあるくらいで大丈夫です。
質問2 講習会のロボットは自分のものになりますか?
回答2 自分のものになります。 参加費の18,000円はロボット費込みです。
質問3 4日間全ての日に参加しなければいけませんか?
回答3 お休みいただいてかまいません。 ただ、別の日に補習などはできませんので、ご了承ください。
質問4 ロボカップジュニア大会はガチの大会なのでしょうか?
回答4 ガチに見えるチームはいますが、それほどではないと思います。
大会はクラス分けがあります。
・日本リーグ (初心者向け。 このクラスに参加していただきます)
・ワールドリーグ (世界大会を目指します)
・オープンリーグ (ガチ勢の集まりです)
順に難易度が上がるルールです。
科学キッズフェスティバルin京山2021

ロボットサッカーの体験会
2021年12月12日、岡山県生涯学習センターにで開催された、科学キッズフェスティバル2021でロボットサッカーのプログラミング体験会を開催しました。
昨年(2020年)も開催したのですが、その後に講習会や体験会を開くことができず、ほぼ1年ぶりの体験会でした。 参加できるメンバーが少なかったため、写真撮影は、片付けするときの確認用に撮った写真だけしかありません・・・
でも久しぶりの体験会は、緊張しましたが楽しかったですね。 またロボットが動いたときは、子どもたちも楽しそうです。
2022年の夏には、実際にロボットを作成する講習会を企画しています。 2019年、2020年と講習会の告知前に中止となっていたので、2022年は是非開催したいと祈っております。