
2023年8月27日(日)に人と科学の未来館サイピアで、4日コースの4日目(最終日)を行いました。 この日の予定は以下の通りです。
- 10:00~12:00 ボールを追いかける
- 12:00~13:00 お昼休憩
- 13:00~15:00 センサー2つで試合
- 15:00~15:30 事務連絡
1.ボールセンサー2つの値を調べます
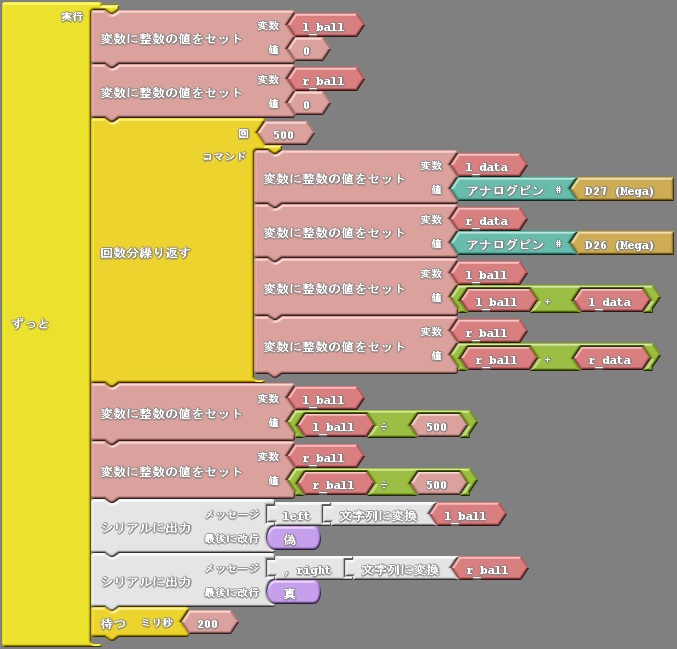
ボールが左にあるとき、中央にあるとき、右にあるときの数値を調べます。 またロボットのセンサーは方向を変更できるので、できるだけ左右差があるように調整します。 この左右差を使って、ボールを追いかけるプログラムを考えます。
2.左右差で左、中、右、ボールなしを決めます。
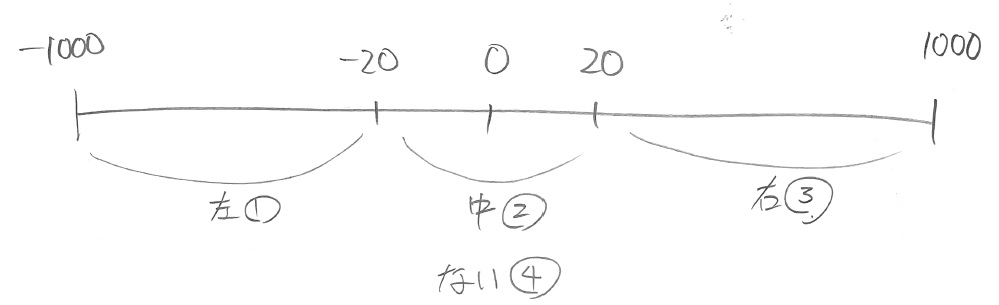
例です。 左右差を使い、値の範囲を決めます。
- -20より小さいとき、左にボールがある。 ①とします。
- -20から20のときで、かつ、以下のとき
- 左センサーが1,000より大きいとき、ボールなし。 ④とします。
- 左センサーが1,000より小さいとき、中央にボールがある。 ②とします。
- 20より大きいとき、右にボールがある。 ③とします。
これをプログラムのdirの数値として正しくなるか調べます。
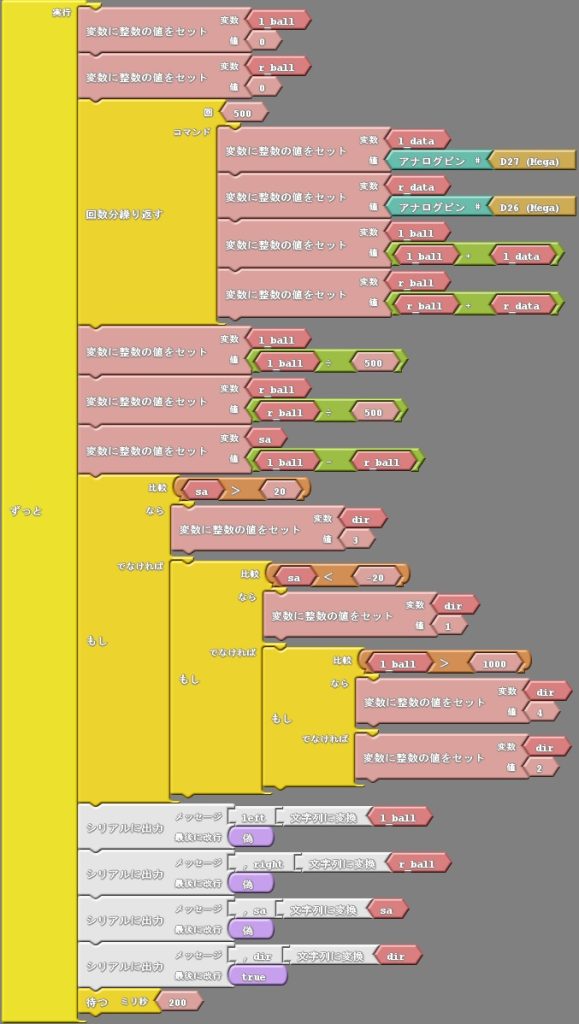
シリアルモニタで、ボールが左にあるとき1、中央にあるとき2、右にあるとき3、ボールが無いとき4と表示されるか確認します。
3.4つの状態に合わせたモーター値を考えます
モーターを動かすときは、スイッチを押すまで動かないよう、おまじないを追加します。 モーター値は全て100ですが、自分でどう動かすか考えます。
このプログラムが期待したとおりに動けば、ボールを追いかけるロボットができあがります。 なかなか調整が難しいと思います。 やはりセンサーが2つになると、プログラムが複雑になってきます。
今回は私が考えた仕組みなので、すぐに理解はできないかもしれないです。 自分なりに考えて作っても良いです。 考えながら作って下さい!
次回は三原市の大会か、練習会でお会いしましょう!